La Electrónica es otro factor clave para la mecatronica. Se refiere a Electrónica como el medio de energia y de funcionamiento de los mecanismos a utilizar en el robot. Sin la electrónica varios elementos importantes del robot serían inoperables, no funcionarian, nisiquiera se podría dar comandos, ni mover al robot por medio de estos.
En la relacion Mecatrónica-Electrónicas se encuentrar diferentes elementos como:
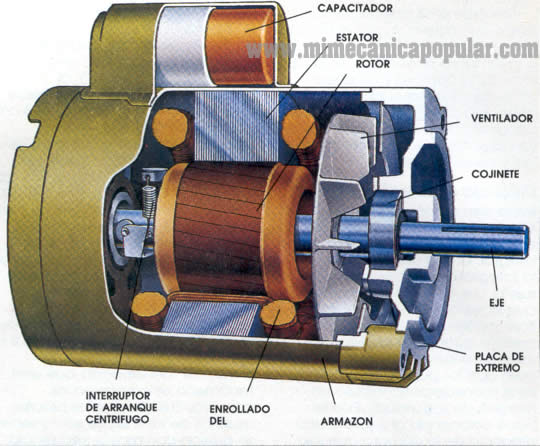
1.Motores Electricos: Dispositivos que tienen como objetivo dar movimientos a el robot, con ayuda de los comandos dados por el control (ejemplo: avanzar, retroceder,parar, etc).
2. Interruptores: Objetos que son utilizados con diferentes propositos. Pueden servir para dar cambios manuales al robot, asi como tambien para que este pueda (como lo harian los sensores) identificar caracteristicas del ambiente en el cual se estan desarrollando.
Motor Eléctrico





 Control Digital (Hardware)
Control Digital (Hardware)
